Sistema informàtic




Descripció
El robot Jinggong integra molts anys d'experiència en la indústria de la logística i ha desenvolupat un sistema de programari de sistema logístic, una plataforma empresarial bàsica i una plataforma de desenvolupament amb drets de propietat intel·lectual independents, integrant disseny estandarditzat i desenvolupament de personalització personalitzada.El model del sistema d'aplicació es construeix utilitzant el mode de flux de treball.Seguiu el concepte de logística moderna, proposeu solucions de sistema completes i completes i realitzeu la unitat perfecta d'emmagatzematge automàtic i logística de producció automàtica.
Configuració de paràmetres bàsics: definiu, configureu i gestioneu els paràmetres paramètrics, la definició completa del permís de rol d'usuari, la configuració de la funció del sistema d'aplicació, la configuració de la ubicació d'emmagatzematge, la configuració del camí logístic i la configuració del procés de negoci, i realitzeu l'aplicació de la localització del client.Adoptar l'arquitectura de codificació estàndard del client, establir i mantenir una gestió de codificació unificada i proporcionar una garantia d'informació bàsica per a la gestió unificada de cada biblioteca;
gestió de tasques
Gestioneu les mercaderies d'entrada i sortida del procés comercial i de manipulació, doneu suport a la gestió de lots i al seguiment de materials, inclòs el processament normal del procés de negoci, el processament del procés d'excepció i el processament de tasques d'emergència.Interfícies gràfiques com ara el seguiment del camí d'accés al material i l'alarma.
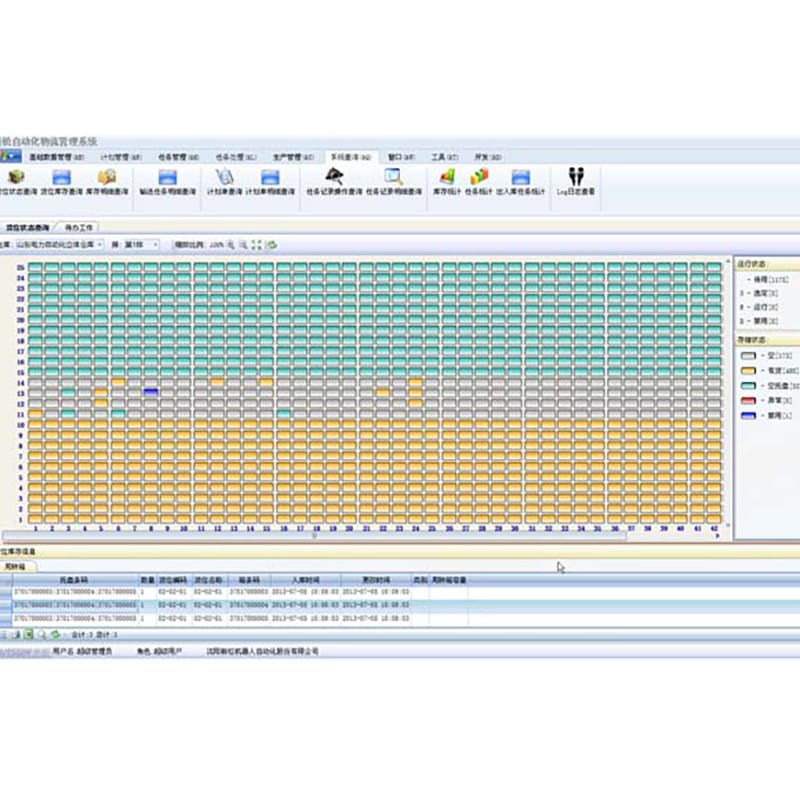
Adoptar tecnologia gràfica de gestió d'inventari
La informació d'inventari, ubicació i àrea d'emmagatzematge s'ha de gestionar de manera intuïtiva i gràfica, i es visualitzarà en temps real la situació d'inventari i la situació del magatzem.
Consulta estadística
Donar suport a les consultes estadístiques definides pel client, inclosos informes estadístics diaris, mensuals i anuals.Importació i exportació de dades Excel.
Sistema d'interfície intel·ligent
El programa d'interfície es construeix mitjançant la definició d'una interfície unificada i components estàndard comuns independents de la plataforma de maquinari, el sistema operatiu i el llenguatge de programació.El sistema de gestió d'informació logística de Xinsong pot mantenir un mode d'operació independent i també es pot integrar perfectament amb equips subjacents i sistemes de programari relacionats.El sistema superior es pot utilitzar com a centre de comandament per deconstruir i assimilar els seus diferents negocis i dades a les instruccions internes i definicions de dades del sistema logístic Xinsong.
sistema d'adquisició de dades
RFID és l'abreviatura d'identificació de radiofreqüència, és a dir, tecnologia d'identificació de radiofreqüència, tecnologia de codi de barres unidimensional i bidimensional.Programari de plataforma de sistemes d'adquisició de dades dissenyat i desenvolupat de manera independent, desenvolupat middleware de lectura de grup RFID, tecnologia de lectura de grup de codis de barres i middleware, integrat diversos equips d'adquisició d'informació, codificació unificada i científica de manipulació de contenidors i plataformes d'operació home-màquina, posicionament ràpid i precís, ràpid i l'adquisició de dades i el processament d'informació eficients, que no només poden fer un seguiment del camí d'un únic contenidor de material, sinó que també poden gestionar tot el procés d'elements de material, aconseguint una recollida de dades àgil i una gestió de materials.
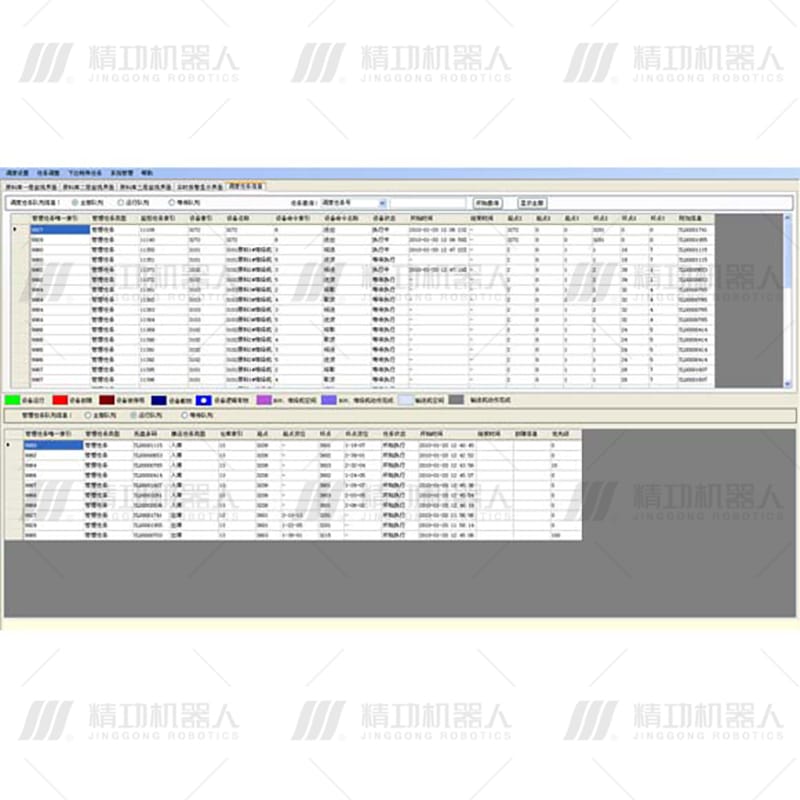
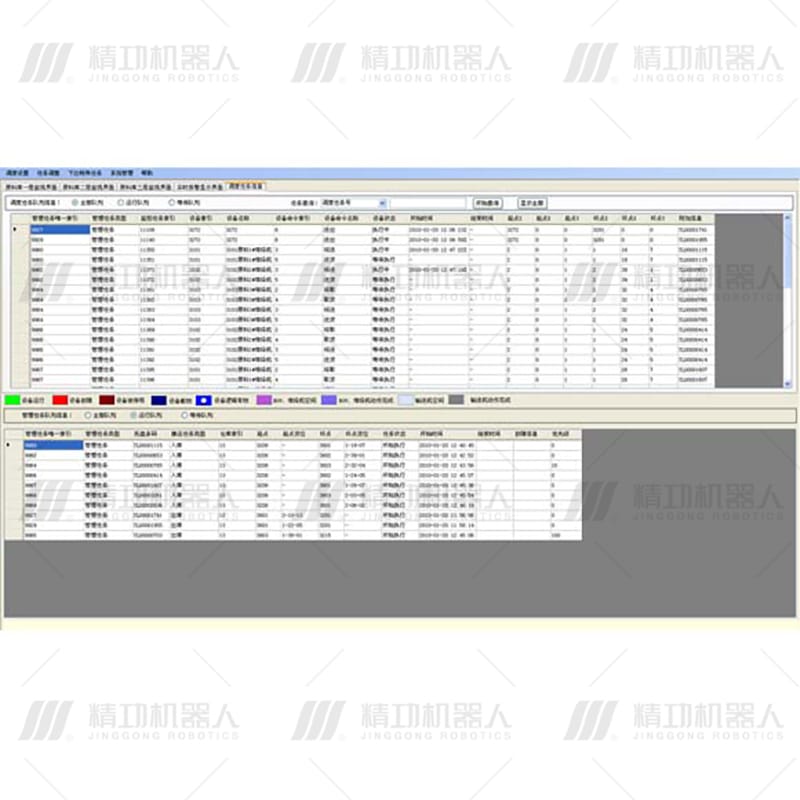
Sistema de seguiment i expedició
Recerca i desenvolupament independents de programari de configuració especial per a la logística, utilitzant la tecnologia OPC per al control de processos, com a interfície estàndard industrial.Realitzeu la gestió gràfica dels equips, integreu el sistema de monitorització de vídeo, controleu el funcionament general en temps real, visualitzeu dinàmicament l'estat de funcionament, la ubicació i l'alarma d'errors de l'equip, proporcioneu una funció d'intervenció manual i desenvolupeu el negoci d'alarma del terminal mòbil.Realitzeu la descomposició de la tasca de gestió i l'optimització del camí, envieu-lo al sistema de control d'equips mitjançant PROFINET Industrial Ethernet i retroalimenteu el sistema de gestió logística després de rebre la informació completa o d'alarma de l'equip de control.
Terminal sense fil i sistema de navegació amb carretó elevador
El sistema mòbil portàtil i el sistema de navegació de carretons elevadors desenvolupats per la tecnologia de xarxa sense fil realitzen la gestió del procés en línia de la manipulació manual.Realitzeu la recollida sense fils i el seguiment de tot el procés d'informació material.El disseny de la interfície d'operació és senzill i clar, i l'operació és convenient.Gestionar eficaçment la connexió de terminals de xarxa sense fil per millorar la seguretat del sistema.
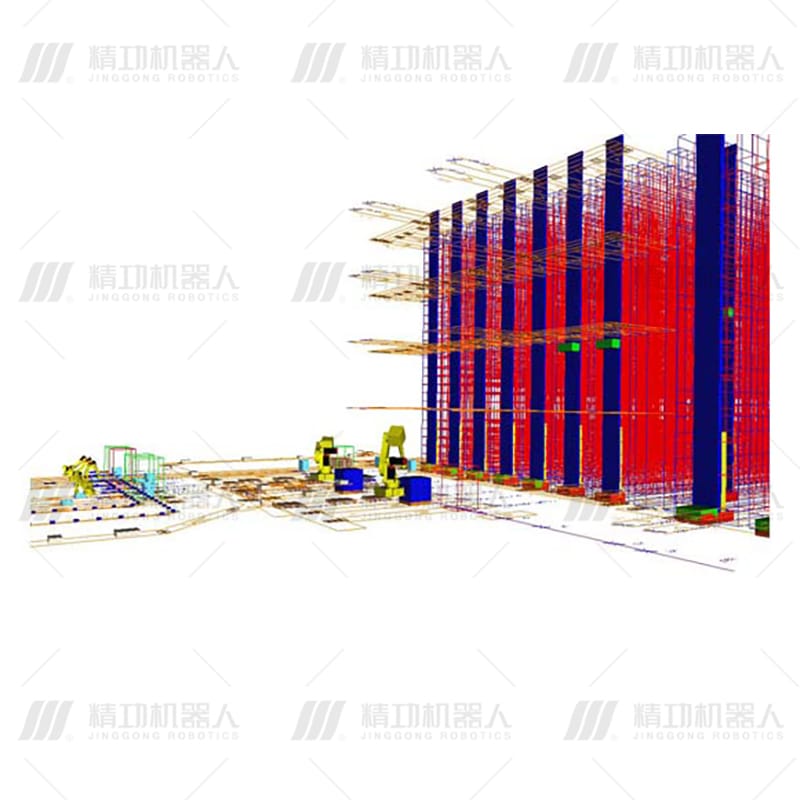
Sistema logístic de producció automatitzat
A partir de la gestió automàtica tradicional del magatzem, realitzeu el control i la gestió de la línia de producció automàtica, compliu la manipulació de materials de cada àrea de producció mitjançant una configuració de procés alta i feu que el magatzem automàtic estigui altament integrat amb la línia de producció automàtica.Té les funcions de gestió del flux de processos, conjunt de producció, preparació de material de producció, programació de la producció, planificació del camí de distribució de la producció, guia de muntatge de producció, etc.Està integrat amb el sistema MES per reduir el procés d'intervenció manual.S'utilitza àmpliament en indústries de fabricació discretes, com ara la inspecció de muntatges per construir un taller digital automàtic.
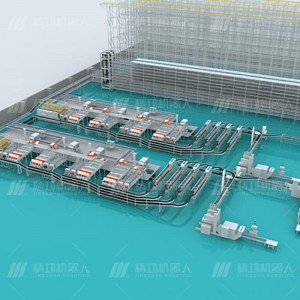
simulació del sistema
El robot Jinggong aplica el programari de simulació més recent i autoritzat de la indústria logística: AutoMod (versió: 12.3.1) de l'empresa nord-americana de materials aplicats per simular la construcció virtual i la producció de l'esquema del sistema logístic, i realitza l'operació de simulació segons el dades proporcionades pel client per comprovar la racionalitat del procés del sistema en el projecte.
Per als equips de recollida i lliurament, s'adopta el càlcul de simulació de capacitat d'equips individuals.Dins de l'interval de temps de simulació establert, cada procés de recepció i lliurament s'aplica a la tasca de lliurament segons el flux real i l'equip processa la recepció i el lliurament segons l'ordre de la cua d'aplicacions.El principi de càlcul és fer un seguiment de la pista de funcionament de l'equip, comptar els temps de funcionament de l'equip, combinar la fórmula de càlcul del temps de funcionament unidireccional de l'equip i tenir en compte el temps de recepció i lliurament, la comunicació i altres temps auxiliars. per calcular la capacitat de processament de l'equip.
A través de tota l'anàlisi logística i l'aplicació del model de simulació del programari de simulació del sistema AutoMod, es simula el procés d'operació del procés de producció del sistema d'emmagatzematge automàtic, cosa que pot explicar si la planificació i el disseny logístics poden complir els requisits d'ús.
Especificacions tècniques
Avantatges
Vídeo del producte
PMF
Avaluació d'usuaris
Mostra de productes


-
Gestió de la distribució logística
-

Equip de soldadura làser per a intercanviador de calor de cotxe
-

Equips de soldadura làser per a la columna de direcció del cotxe
-

Equips de soldadura làser per a reclinables de seients de cotxe
-

Sistema d'execució de fabricació JG-MES
-

Línia d'embalatge automàtica per a tèxtils





